大氣環境用ROBOT
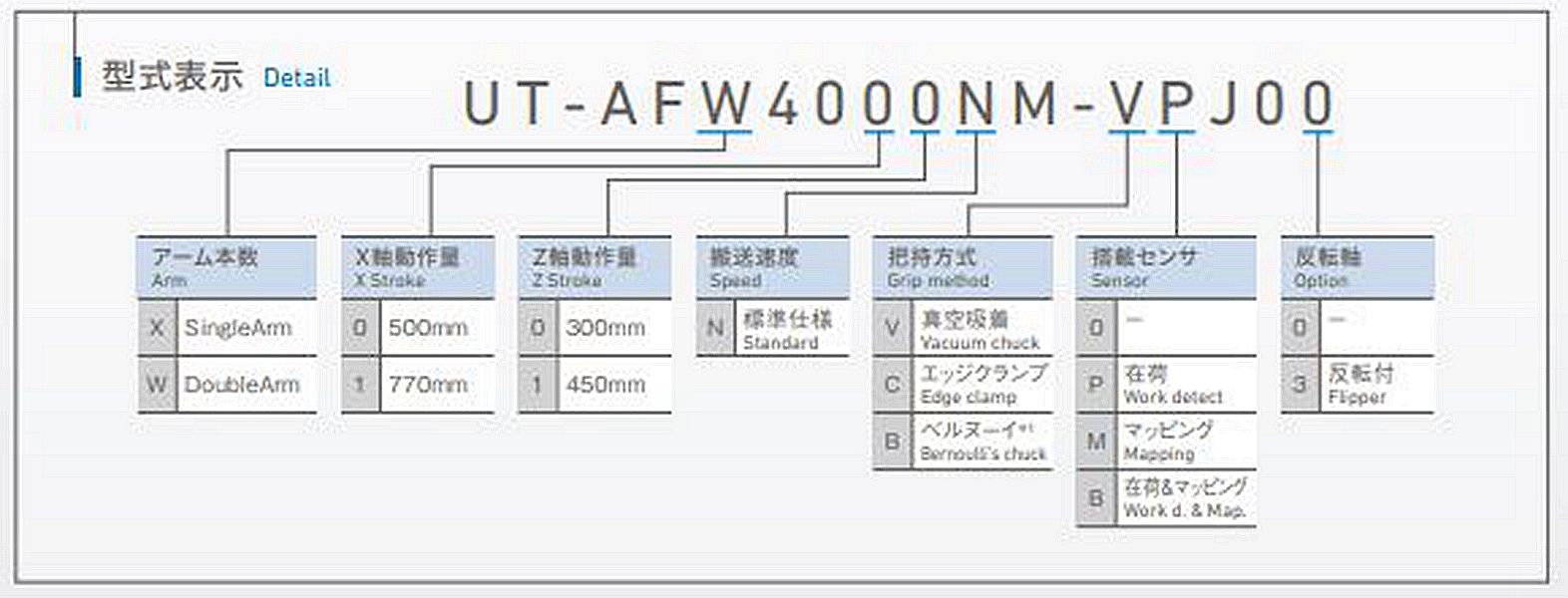
UT-AFX/W4000NM

特 點 Features
■ 伺服驅動器內藏並使用高速電力線通信技術,大幅減少ROBOT本體內配線及外部電纜線數。
■ 高可搬搬送(HAND FOLDER、HAND、搬送工件總重量4kg),可搭載反轉軸。
可對應帶框晶圓搬送、貼合晶圓搬送、光罩搬送。
■ 工件夾持方式有:真空吸附方式、壓縮空氣的邊緣夾緊方式、白努利方式。
■ 白努利夾爪未來預計可對應TAIKO晶圓背面外周夾取。
■Integrate servo-amp and adopt wiring-saving by HD-PLC technology.
■High payload handling of Max 4kg including hand and hand folder.
■As the grip method of wafer, vacuum chuck,edge clamp and Bernoulli's chuck are available.
■Bernoulli's hand is going to chuck part of circumference on TAIKO-wafer backside.
規 格 Specifications*1
| 型號Model | UT-AFW4010NM | UT-AFW4000NM | ||
| 分類 Category | Long Arm Type | High Payload Type | ||
| ROBOT種類 Robot Type | 4軸圓柱座標型 : 4axis Cylindrical Coordinate | |||
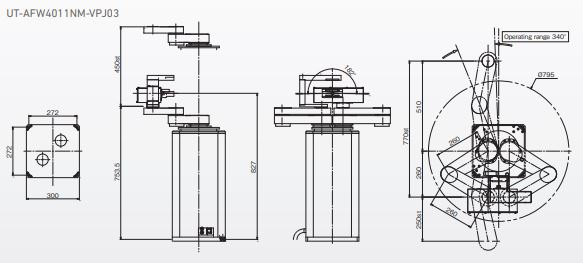
| 動作範圍 Operation Range |
X,A-axis | 770mm | 500mm | |
| θ-axis | 340° | |||
| Z-axis | 300mm or 450mm | |||
| R-axis | - | (182°) | ||
| 最大動作速度 Max. Operation Speed |
X,A-axis | 130°/sec | ||
| θ-axis | 200°/sec | |||
| Z-axis | 250mm/sec. | |||
| R-axis | - | (180°/sec.) | ||
| 動作時間 Cycle Time |
X,A-axis | 1.4sec/770mm | 1.4sec/500mm | |
| θ-axis | 2.2sec/340° | |||
| Z-axis | 1.7sec/300mm or 2.3sec/450mm | |||
| R-axis | - | (1.7sec/180°) | ||
| 位置重複精度 Repeatability | XYZ±0.1mm | XYZ±0.1mm,R:±0.1° | ||
| 可搬重量 Payload | 1kg/2N・m(*2) | 4kg/8N・m(*2) | ||
| 潔淨度 Cleanliness |
Clamp規格 Edge Clamp E/E type | ISO Class 3(ISO-14644) | ||
| 吸附規格 Vacuum E/E type | ISO Class 1(ISO-14644) | |||
| 必要諸元 Facilities | Air | - | 0.4-0.7MPa, 200L/min | |
| Vacuum | -80kPa, 10NL/min | - | ||
| 設置環境 Environment | 温度 Temperature | 5-40℃ | ||
| 濕度 Humidity | 20-70%, No condensation | |||
*2. HAND-BASE、HAND、晶圓的合計重量。 *1. Transfer performance differs from the standard when options are added. *2. including Hand-Bace, Hand and Wafer